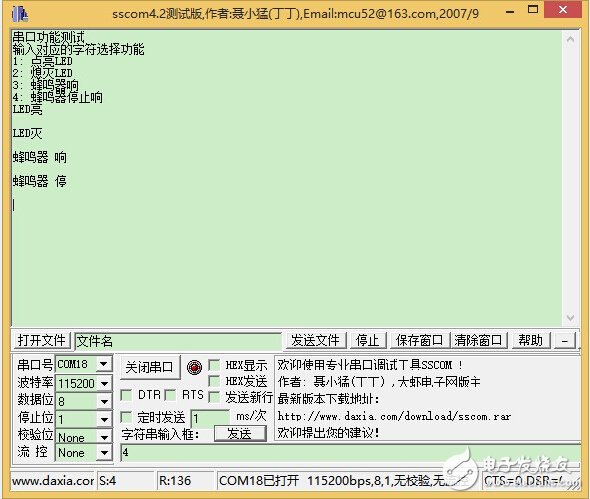
This series of tutorials will be combined with TI's CC254x SoC series to explain the development process of Bluetooth 4.0 from the construction of the environment to the development of the Bluetooth 4.0 protocol stack. The tutorial is divided into six parts, this article is the third part: The third part of the knowledge points: For an introduction to TI's CC254x chip, you can click on the link below to view: Mainstream Bluetooth BLE control chip detailed (1): TI CC2540 Recommended in the same series: From shallow to deep, Bluetooth 4.0/BLE protocol stack development strategy (1) From shallow to deep, Bluetooth 4.0/BLE protocol stack development strategy (2) For the download of the tool for this article, you can go to the following address: Section XI Serial Communication Debugging in the software development process is a very critical process, and the most common means of debugging is to print the log. There are few display devices on the embedded platform, so we need to print the information to the PC through the serial port. MT522xboard has already connected UART0 to DB9 through RS232 chip. We only need to connect DB9 to the computer. The external device IO pin relationship corresponding to UART0 is: P0_2------RX, P0_3------ TX. We need to configure these two IOs as multiplexed functions. The CC2540's USART can be configured in SPI mode or asynchronous UART mode. Here we need to configure the asynchronous UART mode. First configure IO to UART mode: PERCFG &= ~0x01; // Configure UART to position 1 P0SEL = 0x3c; // P0_2, P0_3, P0_4, P0_5 are used as serial port functions P2DIR &= ~0XC0; // P0 takes priority as UART0 Configure the UART0 register to configure UART0 to 8N1 mode with a baud rate of 115200. U0CSR |= 0x80; // UART mode U0GCR |= 11; // U0GCR works with U0BAUD U0BAUD |= 216; // The baud rate is set to 115200 UTX0IF = 0; // clear interrupt flag U0CSR |= 0X40; // Allow reception IEN0 |= 0x84; // open total interrupt, receive interrupt Here, the interrupt mode is used to receive the serial port data, and the receive processing function of the application layer is called back in the interrupt. #pragma vector = URX0_VECTOR __interrupt void UART0_ISR(void) { Uint8 ch; URX0IF = 0; // clear interrupt flag Ch = U0DBUF; If ( NULL != RecvCb ) // call the callback function { RecvCb(ch); } } In order to test the communication function of the serial port, here we receive the command through the serial port to control the LED on and off and the buzzer sound and stop, and display the current status. According to the serial output prompt, sending the corresponding character can realize the corresponding function and display the status. Shaded Pole Ac Motor,Ac Shaded Pole Motors,Shaded Pole Motor,Shaded Pole Induction Motor Changzhou Sherry International Trading Co., Ltd. , https://www.sherry-motor.com
![]() Section XI Serial Communication
Section XI Serial Communication ![]() Section 12 Flash read and write
Section 12 Flash read and write ![]() Section 13 Introduction to the BLE Protocol Stack
Section 13 Introduction to the BLE Protocol Stack ![]() Section 14 How OSAL Works
Section 14 How OSAL Works ![]() Section 15 BLE Bluetooth 4.0 Protocol Stack Startup Analysis
Section 15 BLE Bluetooth 4.0 Protocol Stack Startup Analysis